
机器人六个伺服电机都有一个唯一固定的机械原点,错误的设定机器人机械原点将会造成机器人动作受限或误动作,无法走直线等问题,严重的会损坏机器人。

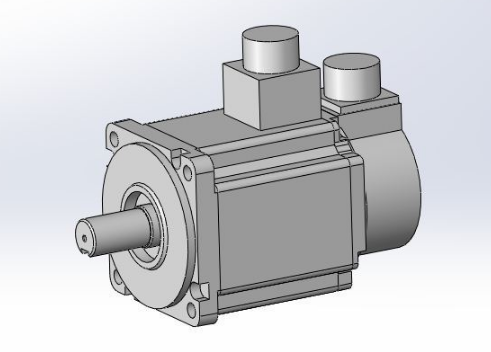
伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。
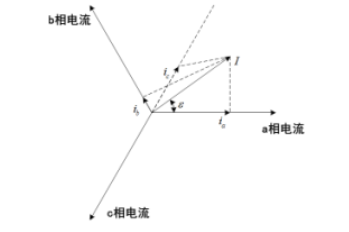
根据伺服电机的原理,想要减少电机发热,就需要减少铜损和铁损。减少铜损有两个方向,减少电阻和减少电流,这就要求我们在选型的时候尽量选择而定电流较小的电机,对两相电机,能用串联的电机就不用并联电机。
在工业4.0时代,国家重点提升改造制造业和发展高端智能装备。伺服控制系统在自动化和高端智能装备中作为直接执行者,起着举足轻重的作用。永磁同步电机(PermanentMagnetSynchronousMotors,PMSM)以其高效率、高气隙磁密度、高功率因素、结构紧凑简单、线性响应...

计算机工业是当今时代较为新兴的技术,在早期都是采用直线步进电机来控制的。采用直线步进电机的优势是因为能够提供开环位置系统控制,然而成本只是需要反馈伺服系统的几分之一。
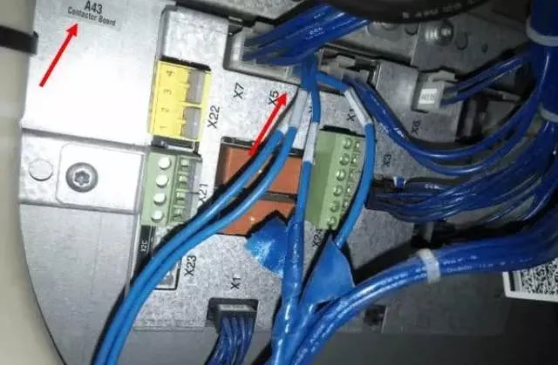
为了顺应工业市场发展的潮流,作为行业领导者的德国 SICK 传感器公司,在 2011 年推出了全数字的伺服反馈通讯协议——HIPERFACE DSL® 协议。这使得伺服反馈的通讯电缆减少到两芯,从伺服驱动器到伺服电机之间的连接只需一条电缆。
在此讨论中,增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备ABZ输出信号外,还具备互差120度的电子换相信号...
 服务咨询
服务咨询
