

五轴六轴混合机器人在激光喷丸中的应用
一、引言
激光喷丸可以用来增加零件的强度及消除应力,主要用于航空发动机叶轮等。通常喷丸要对整个物体的龙阔进行,也有对整个面进行喷丸。对单个发动机叶片类零件的喷丸相当比较简单。但对整个叶轮的每个叶片都进行喷丸时就比较难,激光的发射角固定,而要对叶轮进行转动和位移来确保激光能打在叶片表面理想位置。为了对每个叶片的主要部位都能进行喷丸处理,就要求对整体叶轮进行复杂的运动。通常至少是对其进行五轴五联动运动,最好是六轴六连动运动,这样才能实现无遮挡的理想喷丸。为了满足上面的喷丸要求,沈阳莱茵机器人有限公司开发了两台五轴五联动机器人和一系列六自由度混合型机器人。我们采用了高档,开放式六轴多通道控制系统。几台五轴五联动机器人系统已经连续可靠运行了三年,六自由度混合型机器人运行也非常平稳,可靠。本文简单介绍五轴连动机器人和六轴连动机器人。
二、五轴连动机器人
根据用户对机器人强度高,负载大,运动精度高等要求及人工装卸零件的方便性和光路要求,我们设计了两款五轴连动机器人。它们的结构原理上相同,主要由一个龙门式三轴直角坐标机器人和两个转动轴组成。由于负载重,直角坐标机器人的Z轴采用了如图2所示的双Z轴滚珠丝杆同步驱动。
直角坐标机器人的三个直线运动轴除了采用防尘防水的钢带防护,里面的全部零件都不怕水,能保证机器人长期工作。图3中的机器人是莱茵机电三年前交付给用户,运回维护保养的五轴联动机器人。
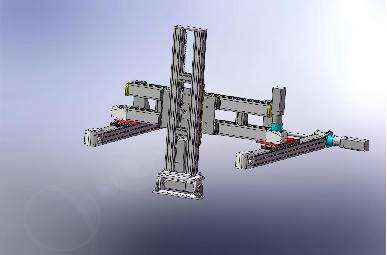
图1是由一个典型的3D悬臂直角坐标机器人和关节机器人的三个末端关节组成的混合型六自由度机器人。

图2是要马上发货的五轴连动机器人。

图3是无故障工作了三年,回厂保养的五轴联动机器人。
五轴联动机器人的第四个轴是安装在Z轴下端,以Z轴为轴心的转动轴,叫A轴。A轴主要由高精度交流伺服和反向间隙小于0.5弧分的紧密减速机组成。A轴带动转动轴B以水平面为轴转动。B轴也主要由高精度交流伺服和反向间隙小于0.5弧分的紧密减速机组成。
三、五轴联动机器人的控制系统及电箱
由于五轴联动机器人的Z轴采用双Z轴滚珠丝杆同步驱动方式,共计采用了6台伺服电机。我们采用了沈阳莱茵机器人公司自己开发的,基于ARM的嵌入式8轴连动控制系统。为了双Z轴的严格同步,在FPGA里面两路伺服电机位置环控制信号由同一路控制信号控制。如图4所示,该嵌入式8轴连动控制系统带CAN总线,RS485接口和以太网接口,支持Modbus通信协议。可以链接常见的触摸屏和工控机。所有IO口带短路保护及扩展,还可以很方便搭建成主从时式分布式控制系统。该控制系统是莱茵机器人十多年开发积累的,已在织布机的电送点卷,包装机和火焰切割机上批量连续可靠工作多年的嵌入式系统。该系统有是一个高度开放的控制系统,可以方便修改,增添功能,及用户自己二次开发。
四、工作过程
由于激光束的方向是不能改变的,必须控制被喷丸的工件如此精确平稳运动,确保激光束在要被喷丸处理的区域,按要求的轨迹和顺序喷丸。为此采用示教方式工作,各个轴间可以同时联动和独立运动。激光系统可以放出一个几乎没有任何能量的激光点,我们称为参照激光点。参照激光点的方位与喷丸的激光束完全一样。示教时,先手动运动使参照激光点照到要被喷丸处理的轨迹上,然后确认该点为有效点。示教时操作者可以用手动操作器在被喷丸零件边上边看看控制运动。但出于安全考虑,操作员也可以借助高分辨率高清晰的视频监控系统来控制参照激光点在零件上的位置。系统自动记录下这些有效点对应机器人各种轴的位置,然后上位机离线自动生产喷丸运动轨迹,自动优化各个轴在各个点的运动分量,使运动过程平稳高速。可以对喷丸轨迹进行图示,局部放大,优化喷丸顺序,删减等操作。
如果能得到被喷丸零件的3DCAD数据,给出喷丸信息后,借助CAM软件可以自动生成运动轨迹。但通常出于保密等原因,通常是得不得对应的3DCAD数据。
五、六轴连动机器人
对于复杂的整体叶轮等采用六轴联动机器人会更方便。图4是混合型六轴联动机器人的结构形式之一,它由三个直线运动轴,两个转动轴和一个摆动轴组成。其中三个直线运动轴是典型的悬臂型直角坐标机器人,也可以是图2中所以的龙门式三维直角坐标机器人。在上下运动的Z轴下端带动一个旋转轴,旋转轴带动一个摆动轴,摆动轴末端再带动一个旋转轴。最末端的旋转轴带动手爪。由于两个旋转轴和一个摆动轴其实就是关节机器人的末端三个运动轴,所以六轴混合机器人就是三轴直角坐标机器人加上关节机器人的三个最末端运动轴组合而成。根据实际应用需要,混合型机器人的直线运动轴也可以是二维的XY轴结构或XZ轴结构,也可以是龙门式结构。其各个直线运动轴的行程及承载能力可以按要求去做。而两个转动轴和一个摆动轴组成也可以按需要仅选择一个转动轴,如从生产线把箱体码垛到托盘上,也可以是一个转动轴和一个摆动轴及其他组合。
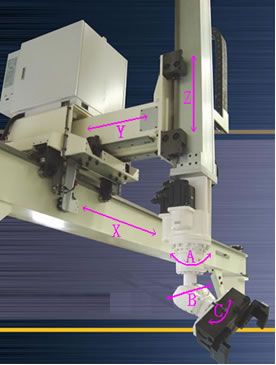
图4:混合型六轴联动机器人示意图
六、六轴联动机器人的控制系统
六轴联动数控系统是一个高度开放,功能强大的数控系统。其控制轴数最多可以达64轴,它可以是单通道数控系统,也可以设置为多通道数控系统。可以以脉冲方式,总线通信方式和模拟量方式控制运动轴和主轴,强大开放的PLC功能可以按用户要求来配置。其软件功能非常丰富,包含有几乎任何常见的G代码和M功能。操作界面人性化及按用户要求来定制。系统插补周期短,可视化PID调节功能高效简单。而且还可以扩展增加电子凸轮来实现活塞车等功能特种车铣功能。
主要功能:
1)测量功能
五轴机床含两个摆动/旋转轴,两个轴的转动中心点坐标及与三个直线轴间的夹角统必须精确获取。通过测量自动计算出这些数据。
2)刀具中心点控制功能(RCTP)
五轴加工中心所用的程序由CAD/CAM软件产生,大多数系统的程序是基于刀具中心点编写的程序。但当换刀时中心点位置变了,就要重新生成程序,非常不方便。而基于刀尖中心点编程,即物体表面3D位置(X,Y,Z)和该点的刀尖方向(A,B)的编程就仅与被加工的物体几何尺寸有关,而与刀具长度和机床结构没有关系。RCTP功能就是把基于物体表面3D位置(X,Y,Z)和该点的刀尖方向(A,B)的程序自动分解成各个轴的运动。
3)该系统可以适合工作台上带有两个旋转轴,或加工刀具上(主轴)带两个摆动轴,或工作台上带有一个旋转轴,而加工刀具上(主轴)带一个摆动轴结构形式的五轴机床。4)3D刀具补偿功能保证在加工过程中换刀时软件自动计算补偿刀具半经变化带来的轨迹位置变化。该功能避免了换不同半径的刀具时要重新生成加工程序。5)倾斜轴功能保证了机床的X,Y和Z轴间可以是任意角度,而该功能自动换算出编程时相互垂直的X,Y和Z轴。还可以克服X...工作台上带有两个旋转轴,或加工刀具上(主轴)带两个摆动轴,或工作台上带有一个旋转轴,而加工刀具上(主轴)带一个摆动轴结构形式的五轴机床。
4)3D刀具补偿功能保证在加工过程中换刀时软件自动计算补偿刀具半经变化带来的轨迹位置变化。该功能避免了换不同半径的刀具时要重新生成加工程序。
5)倾斜轴功能保证了机床的X,Y和Z轴间可以是任意角度,而该功能自动换算出编程时相互垂直的X,Y和Z轴。还可以克服X,Y和Z空装配误差,起到软件补偿功能。
6)该系统包含有多通道多轴控制系统,可以控制特殊复合机床,实现一次装夹多工序全自动加工。她能使特种复合加工中心及生产线实现高效高精密加工。
七、结论
这类六轴联动混合型机器人本质上是来自一些应用需要,综合了直角坐标机器人的关节机器人的优点,具有下面的主要优点:
1、极大扩展了工作空间,X轴的工作行程可以达到100米长,Y轴可以达到10米。
2、承载能力更强,特殊结构可达2400Kg。
3、工作精度更高,直角坐标机器人部分可以采用精密滚珠丝杠传动,重复定位精度可达0.01mm,甚至更高。
4、结构形式多样性,直接坐标机器人可以按需要选择龙门式、悬臂式、壁挂式等。同时可以增减旋转轴和翻转轴,构成五到八自由度机器人。
5、能替代关节机器人,完成打磨倒角,焊接,上下料额码垛搬运等任务。
6、成本低,控制简单,易于维护。
上面是其主要的优点,在打磨倒角,机床上下料,大型零件焊接,码垛搬运等工作中有关节机器人无法比拟的优点。可以在几乎所有的应用中取代关节机器人。
文章版权归西部工控xbgk所有,未经许可不得转载。









 服务咨询
服务咨询