

应变传感器稳定性研究
1、引言
传感器长期稳定性是指传感器在使用过程中其各种技术指标随时间而变化的程度。传感器基本技术指标共有十多项,把这些具体指标的长期稳定性问题放在一起讨论是很困难。这是因为传感器多项技术指标之间不相互联系,其间不存在简单的数学关系,其关联的技术和理论知识面广而且很复杂。
本文论述了应变传感器零点输出长期稳定性问题。从理论上论述了传感器零点输出值随时间变化的机理。影响传感器零点输出长期稳定性因素是在传感器制造工艺、选材和工人操作因素引起的传感器工作电路电阻率变化,基底胶和弹性体材料的应力状态,几何尺寸的变化而导致传感器零点输出值的变化。
如何提高电阻应变式传感器以下简称传感器的长期稳定性,这是国内传感器行业非常关心的问题。
2、应变传感器工作原理
应变效应——材料在受外力作用时,将产生机械变形,机械变形会产生阻值变化,这种因形变而使其阻值发生变化的现象称为“应变效应”
基本原理——σ=E*ε,ΔR/R=K*
ε,其中σ为试件的应力,ε为试件的应变,E试件材料的弹性模量,ΔR/R电阻变化率,K为灵敏度系数,一般在1.7—3.6之间
测量原理——用应变片测量时,将其粘贴在弹性体上。当弹性体受力变形时,应变片的敏感栅也随同变形,其电阻值发生相应变化,通过转换电路转换为电压或电流的变化
检测电路——把应变计的ΔR/R变化转换成电压或电流变化,通常采用惠斯登电桥电路实现这种转换,如图1。

图1惠斯登电桥
平衡条件:R1/R2=Rx/R3=n(1)
输出电压:![]()
3、影响应变式传感器稳定性原因探讨
3.1引起应变传感器不稳定原因分析
根据传感器的工作原理,引起传感器零点输出值变化的因素是传感器工作电路中电阻的变化。传感器在制造、使用过程中由于哪些因素影响引起传感器工作电路电阻的变化是所要研究的本质问题。
根据量子力学原理[5],金属由一群依一定规则排列原子构成,每颗原子均有一层(或多层)由电子组成的外壳。这些在外壳的电子能脱离原子核的吸引力而到处流动,是金属能导电的主要原因。当金属两端产生电势差(即电压)时,电子因电场的影响而作规则的流动,是为电流。在现实中,物质的原子排列不可能为完全规则,因此电子在流动途中会被不按规则排列的原子打散,是为电阻的来源。
根据电阻定律,导体的电阻R跟它的长度L成正比,跟它的横截面积S成反比,还跟导体的材料有关系,其公式为:
R=ρL/S(1)
其中ρ:制成电阻的材料电阻率;L:绕制成电阻的导线长度;S:绕制成电阻的导线横截面积,R:电阻值。
某种材料制成的长1米、横截面积是1平方米的导线的电阻,叫做这种材料的电阻率。是描述材料性质的物理量。国际单位制中,电阻率的单位是欧姆·米。与导体长度L,横截面积S无关,只与物体的材料和温度有关,有些材料的电阻率随着温度的升高而增大,有些反之。
通过上述分析可知,导体电阻变化是引起传感器不稳定的直接原因,而电阻主要有电阻率、导体横截面积和导体长度决定。
3.2影响电阻率变化的原因分析
在普通电工学中,一定材料的电阻率是按常数来对待的,可是在研究传感器的时候却不能把电阻率按常数来对待。
根据量子力学,金属的电阻率要随着电子的散射几率而变化。电子的散射几率越大,材料的电阻率越大。电子散射几率是主要受温度、应力、压力、范性形变、材抖的化学成分和材料的组织结沟等因素的影响。
由于对某种金属而言材料的化学成分已经确定,应力、压力、范性形变的改变本质上是改变了金属内部某些组织结构,导致电子散射几率变化,所以本文主要对引起电子散射几率变化的温度和范性形变进行分析。
3.2.1范性形变对电阻率的影响
固体受外力作用而使各点间相对位置的改变,当外力撤消后,固体不能恢复原状谓之“索性形变”,又称为“范性形变”。
金属范性形变的方式可有以下几种:孪生、滑移、扭折。
滑移是金属晶体范性形变最主要的方式,也就是晶体的相邻部分在切应力作用下沿着一定的晶面和一定的晶体方向相对移动。在绝大多数情况下,金属以多晶体形式使用。多晶体是由大量称为晶粒的小晶体组成,每个晶粒的取向与其相邻晶粒不同,从而使金属在外力作用下在宏观上表现为各向同性体。多晶体范性形变时,一个晶粒的变形必须与相邻各个晶粒的变形相协调,否则材料的连续性将不能保持。理论分析指出,为了使多晶体通过滑移产生连续性不受破坏的变形,每个晶粒中至少要有五个独立的滑移系统动作。实验证明,即使在应变很小的情况下,各个晶粒也明显地在几个滑移系统上滑移,特别是在靠近晶界的区域。由于晶粒间界对滑移的阻碍作用,以及多个滑移系统的位错相互干扰,多晶材料的应变硬化速率较大。
多晶体范性形变过程中,各个晶粒在形状改变的同时也发生转动。经过较大的形变之后,各个晶粒的某一晶体方向逐渐集中到施力轴方向上来,这种状态称为择优取向,得到的组织称为织构。金属的形变织构依照加工方式的差异具有不同的类型,多晶体中有了织构之后,其性能在一定程度上表现出各向异性。
滑移过程的机制最终归结为位错沿滑移面的运动。在此基础上可以想象,范性形变所需的力应该是用于克服位错产生、增殖和运动时所遇到的障碍,而形变速度则决定于单位体积中位错数量的多少,以及位错本身的运动速度。由于位错附近的原子已经从点阵的平衡位置移动出来,使位错前进一个原子间距,所要求原子的移动距离是很小的,而且随着位错的运动,在一些原子势能升高的同时另一些原子势能降低,总能量变化很小,所以晶体以位错运动的机制逐步滑移,比无位错完整晶体作刚性相对滑移所需的力要小得多;在后一种情况下,要经历滑移面上的全部原子同时向高能位置移动的过程。然而,位错毕竟要克服势垒才能前进,这种来源于晶体周期性结构的阻力称为点阵阻力。点阵阻力与原子间结合键的性质密切相关。金属晶体在范性性质上与共价晶体和多数离子晶体具有显著差异的根本原因,在于点阵阻力较小。晶体中的各种缺陷如点缺陷、其他位错、晶粒间界、第二相质点等,对位错的运动也产生阻力。
同时,金属晶体就是依靠各正离子与公有的自由电子间的相互引力而结合起来的,而离子与离子间以及电子与电子间的斥力则与这种引力相平衡,使金属处于稳定的晶体状态。金属原子的这种结合方式称为“金属键”。范性形变引起原子结合键的变化和原子间的距离增大,也对电阻率有影响。
通过上文论述可知范性形变使晶体点阵发生了改变,造成电场不均匀性,导致电子波散射增加。范性形变程度越大,电子散射几率越大,电子散射几率越大,电阻率也越大。同时,范性形使金属原子间距及结合键发生改变,从而导致电阻率有所变化。
3.2.2温度对电阻率的影响
温度越高,电子的振功越强烈,电子也越容易被散射,电子散射率增大,电阻率也增大。
3.3几何形变对电阻的影响
定义:由电阻定律可知,影响电阻变化的主要有电阻率、导体横截面积和导体长度,我们把导体横截与导体长度之比称为几何形变。
由热胀冷缩原理可知,温度对材料的几何形变有影响。
当试件与电阻丝材料的线膨胀系数相同时,不论环境温度如何变化,电阻丝的变形仍和自由状态一样,不会产生附加变形。当试件和电阻丝线膨胀系数不同时,由于环境温度的变化,电阻丝会产生附加变形,从而产生附加电阻。
3.4影响应变式传感器稳定性原因总结
通过上面论述可知,影响应变传感器稳定性的主要因素是温度,范性形变,几何形变。温度的变化引起应变片电阻率变化及几何形变,从而导致应变传感器零输出时的漂移。范性形变改变了电阻率,导致电阻值改变。在应变片使用中,粘贴方法,残余应力等产生应变片的几何形变。
4、改善应变式传感器稳定性方法探讨
解决应变式传感器零点输出长期稳定性的问题,就必须解决传感器制造工艺和整个传感器制造过程中控制电阻材料的电阻率变化因素、基底胶和弹性体材料的应力状态、几何尺寸的变化问题。怎样解决这些问题是具体的技术问题。在实际工程中,可以从以下方面改善应变式传感器稳定性。
4.1应变片的粘贴
敏感元件是电阻应变式传感器的重要组成部分,在实际测量中常选用应变片,因此应变片的粘贴成了关键技术之一。
应变片粘贴注意分清应变片的正、反面(有引出线引出的一面为正面),用左手捏住应变片的引线,右手上胶,在应变片的粘贴面(反面)上匀而薄地涂上一层粘结剂。待一分钟后,当胶水发粘时,校正方向(应变片的定位线与十字线交叉线对准,其电阻栅的丝绕方向与十字线中较长线的方向一致,即保证电阻栅的中心与十字交叉点对准,再垫上塑料薄膜,用手沿一个方向滚压1~2分钟即可。见图2。

图2 应变片粘贴示意图
应变片粘贴完毕后的检查:应变片贴好后,先检查有无气泡、翘曲、脱胶等现象,再用数字万用表的电阻档检查应变片有无短路、断路和阻值发生突变(因应变片粘贴不平整导致)的现象,如发生上述现象,就会影响测量的准确性,这时要重贴。
4.2残余应力的消除
当完成应变片全部粘贴后,把弹性体与筒体焊接在一起,再消除一次残余应力。考虑到贴片用的粘合剂在过高的温度下会老化,只能采取反复加载和机械振动来去除应力.采用反复加载和机械振动的办法,有利于内应力的加速释放。特别是在应变式传感器中,在贴片后进行疲劳加载,有利于改善传感器的性能。
4.3温度补偿
电阻应变片的温度补偿方法通常有线路补偿法和应变片自补偿两大类。
(1)桥路补偿法
电桥补偿是最常用的且效果较好的线路补偿法。图3所示是电桥补偿法的原理图。电桥输出电压Uo与桥臂参数的关系为:
Uo=A(R1R4-RBR3)(2)
(2)式中:A——由桥臂电阻和电源电压决定的常数。
R1—工作应变片;RB—补偿应变片
由上式可知,当R3和R4为常数时,R1和RB对电桥输出电压U0的作用方向相反。利用这一基本关系可实现对温度的补偿。测量应变时,工作应变片R1粘贴在被测试件表面上,补偿应变片RB粘贴在与被测试件材料完全相同的补偿块上,且仅工作应变片承受应变。如图3所示。
当被测试件不承受应变时,R1和RB又处于同一环境温度为t℃的温度场中,调整电桥参数,使之达到平衡,有
Uo=A(R1R4-RBR3)=0(3)
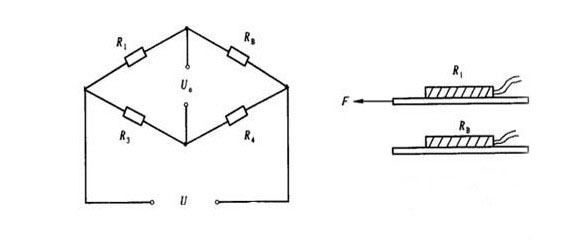
图3 电桥补偿法
工程上,一般按R1=R2=R3=R4选取桥臂电阻。当温度升高或降低Δt=t-t0时,两个应变片的因温度而引起的电阻变化量相等,电桥仍处于平衡状态,即:
Uo=A[(R1+ΔR1t)
R4-(RB+ΔRBt)R3]=0(4)
若此时被测试件有应变ε的作用,则工作应变片电阻R1又有新的增量ΔR1=R1Kε,而补偿片因不承受应变,故不产生新的增量,此时电桥输出电压为:
Uo=AR1R4Kε(5)
由上式可知,电桥的输出电压Uo仅与被测试件的应变ε有关,而与环境温度无关。应当指出,若实现完全补偿,上述分析过程必须满足四个条件:
①在应变片工作过程中,保证R3=R4。
②R1和RB两个应变片应具有相同的电阻温度系数α,线膨胀系数β,应变灵敏度系数K和初始电阻值R0。
③粘贴补偿片的补偿块材料和粘贴工作片的被测试件材料必须一样,两者线膨胀系数相同。
④两应变片应处于同一温度场。
(2)应变片的自补偿法这种温度补偿法是利用自身具有温度补偿作用的应变片,称之为温度自补偿应变片。这种方法是通过精心选择敏感栅材料与结构参数来实现热输出补偿。粘贴在被测部位上的是一种特殊应变片,当温度变化时,产生的附加应变为零或相互抵消,这种应变片称为温度自补偿应变片。
5、总结
应变传感器的长期稳定性是国内传感器行业非常关心的问题。由于应变传感器在工程应用中,除了其自身物理特性造成的不稳定外,还受应变片粘贴方法,被测试件弹性体残余应力等外界因素影响。本文从材料力学,量子力学和电子学方面深入探讨了造成应变传感器不稳定性的本质原因,并总结了改善不稳定性常用的方法。由于造成应变传感器测试系统不稳定的因素很多,如焊接方法,测试中连接线的摆动等,本文只分析总结了最本质的一些原因,并给出了一些工程中最常见的改善方法,更全面的方法还得在以后工程应用中不断总结积累。
文章版权归西部工控xbgk所有,未经许可不得转载。










 服务咨询
服务咨询