

光电轴角编码器选型
引言
光电轴角编码器(以下简称光电编码器),它是以高精度计量圆光栅为检测元件,通过光电转换及相应硬件处理电路将输入的角位置信息转换成相应的数字代码,并可与计算机等控制系统及显示装置相连接,实现数字化测量、控制与显示。
光电轴编码器具有较高的性能价格比,且具有结构紧凑、可靠性高、精度高等优点,广泛地应用于数控机床、机器人、雷达、光电经纬仪、地面指挥仪和高精度闭环调速系统等诸多领域,是自动化设备理想的角度和速度传感器,它已成为检测旋转角度和线性位置的最为重要的手段之一。
本文主要介绍光电编码器的选型原则。
光电编码器类型简介
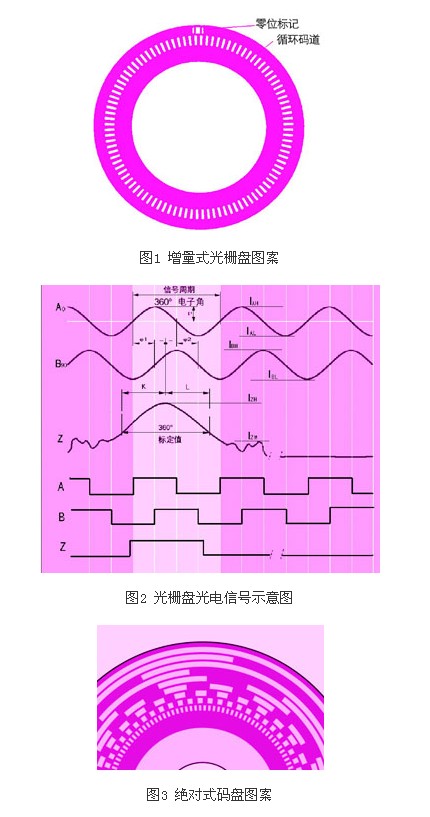
光电编码器按所使用的光学码盘图案通常分为增量式、绝对式与混合式三种,其中增量式编码器主要用于测量旋转轴速度,绝对式编码器主要用于测量旋转轴的空间位置,混合式编码器是增量式编码器与绝对式编码器的组合,具备增量编码器和绝对式编码器的一些特点。光电编码器后端加入处理芯片之后,三种光电编码器都具有测量旋转轴速度与空间位置的功能。具体光栅图案见图1~图3,其原理已有很多文章介绍,这里不再赘述。
光电编码器选型原则
目前,使用光电编码器测量角度和长度已经是成熟技术。在进行光电编码器选型时主要从以下几个方面考虑:
光电编码器类型;
外形;
分辨率、精度;
信号输出形式。
光电编码器类型选择
光电编码器通常用于角度测量,并且经过机械装置转换后也可以进行长度的测量,因此光电编码器在角度和长度测量领域应用很广泛。
测长度还是测角度;测长度如何通过机械方式转换;测量范围是360°以内(单圈),还是超过360°(多圈);转动方向是一个方向旋转循环工作,还是正反向方向循环工作;测量速度还是测量角位置,这都是在选择光电编码器时需要事先确定的。
角度测速常采用增量式编码器,其具有体积小、价格低等优点,且可以无限累加测量,因此目前增量式编码器在测速应用方面仍处于无可取代的主流位置。增量式编码器在转动时输出脉冲,通过计数装置来计算速度和位置。当编码器断电时,依靠计数装置的内部记忆来保存位置,因此断电后,编码器不能有任何转动。当再次通电工作时,编码器输出脉冲过程中,也不能有脉冲干扰,否则,计数装置记忆的零点就会偏移,而且这种偏移量是不确定的,只有错误的生产结果出现后才能发现。解决这个问题的方法是增加参考点,编码器每经过参考点,用参考标记修正计数装置的计数值。在经过参考点以前,是不能保证位置的准确性的。因此,在工业控制中有每次操作先找参考点的操作步骤。这样的操作对有些工控项目比较麻烦,甚至有些项目不允许开机寻找参考点,并且对位置、零位有严格要求,则这样的项目就应该选用绝对式编码器。
绝对式编码器输出代码具有位置唯一性(单圈或多圈),经过后续控制系统进行运算后不仅可以测位置也可以测速。绝对式编码器光栅码盘上有许多条刻线,每条刻线依次以2线、4线、8线、16线……排列,这样,在编码器的每一个位置,通过读取每条刻线的亮、暗,获得一组从20~2n-1的唯一的二进制编码(格雷码),这就称为n位绝对式编码器。绝对式编码器输出角度信息由光栅码盘机械位置决定,因此每个位置具有唯一性,它无需记忆,无需找参考点,不受断电、干扰的影响。所以,光电编码器的抗干扰性、数据的可靠性大大提高。由于绝对式编码器在位置定位方面明显地优于增量式编码器,已经越来越多地应用于工控定位中。
绝对式编码器又分为单圈绝对式编码器和多圈绝对式编码器。
当编码器主轴转动超过360°时,角度编码又回到原点,这样就不符合绝对编码的唯一原则,这样的编码器只能用于旋转范围在360°以内的测量,称为单圈绝对式编码器。
如果要测量旋转超过360°角度范围,就要用到多圈绝对式编码器。运用钟表齿轮的传动原理,当主光栅码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮、多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的绝对式编码器就称为多圈绝对式编码器,它同样是由机械位置确定编码,每个位置编码唯一不重复,且无需记忆。多圈绝对式编码器在长度定位方面的优势明显,已经越来越多地应用于工控定位中。
光电编码器机械外形选择
光电编码器机械外形选择主要包括以下几方面:
轴的连接形式:空心轴(轴套型连接)、实心轴(通过软性联轴器连接);
轴径;
定位止口,安装孔位;
电缆出线方式;
安装空间体积;
工作环境防护等级。现场条件恶劣的,必须使用金属光栅的旋转编码器,通常金属光栅每圈脉冲数一般不大于1000个。
光电编码器分辨率、精度选择
在闭环控制的pwm伺服系统中,对测速装置的要求比较高,通常应满足:
分辨率。分辨率表征测量装置对转速变化的敏感度,当测量数值改变,对应转速由n1变为n2,则分辨率q定义为
q=n2-n1 (r/min) (1)
q值愈小,说明测量装置对转速变化愈敏感,亦即其分辨率愈高。为了扩大调速范围,使电动机在尽可能低的速度下运行,必须有很高的分辨率。
精度。精度表示偏离实际值的百分比,即当实际转速为n时测速精度为: 影响测速精度的因素有:测速原件的制造误差、安装误差及对脉冲计数时总有的±1个脉冲的误差。
影响测速精度的因素有:测速原件的制造误差、安装误差及对脉冲计数时总有的±1个脉冲的误差。
检测时间。所谓检测时间,即连续两次速度采样的间隔时间t,t愈短愈有利于实现快速响应。
信号输出形式
编码器信号输出的电路结构形式常见有推挽输出、电压输出、集电极开路(oc门)输出、长线驱动器输出等。其输出方式应和控制系统的接口电路相匹配。根据编码器输出信号关系可分为方波信号输出、正弦信号输出、并行格雷码输出、并行二进制输出、串行输出等。
对增量式编码器,其输出信号一般为互差90°电角度的信号和参考标记信号,信号线较少。在距离较近的情况下,可以选择电压输出、推挽输出或集电极开路输出。输出带反向信号的抗干扰要好一些,即输出a+、a-,b+、b-,z+、z-信号,每路同相和反相信号在电缆中的传输是对称的,可以抑制共模干扰。对于长距离传输,一般选择带驱动器输出,由于驱动器具有差分功能,能够更好抑制长线传输干扰。
对于绝对式编码器,其输出为绝对角度信息(多位格雷码或二进制码),输出形式可以采用并行输出或串行输出。
采用并行方式输出就是在接口上有多点高低电平输出,以代表角度代码的1或0,对于位数不高的绝对式编码器,一般就直接以此形式输出角度代码,可直接进入plc或上位机的i/o接口,输出即时、连接简单。输出电路选择上可以有电压输出、推挽输出、集电极开路输出或长线驱动器输出。
但是并行输出有如下问题:
尽量使用格雷码。格雷码在任意两个相邻的数之间转换时,只有一个数位发生变化,大大地减少了由一个状态到下一个状态时逻辑的混淆。如果采用二进制码,在数据刷新时可能有多位变化,读数会在短时间里造成错码,这就需要有相应电路来判断然后读取角度数据;
所有接口必须确保连接好,如有个别连接不良,将造成错码;
传输距离较近,一般在10米以内,对于复杂环境,需要有隔离;
由于位数较多,因此信号线多,故障点增加。
串行输出就是通过约定,在时间上有先后的数据输出,同时对每一个数据帧的格式都进行规定,这种约定称为通讯协议,其连接的物理形式有rs232、rs422、rs485等。串行输出连接线少,传输距离远,一般高位数的绝对式编码器都是采用串行输出形式。串行通讯格式有些可以与厂家协商,有些外国公司产品是统一的,如海德汉公司的ssi接口输出以及endat接口等。
结语
随着光电轴角编码器集成化、小型化以及研制的更趋完善,其产品也将在测控领域占领更大的市场。
本文综述了增量式、绝对式光电轴编码器的选型原则,希望能够对光电编码器在工程中的推广应用起到积极作用,同时欢迎批评指正。
文章版权归西部工控xbgk所有,未经许可不得转载。









 服务咨询
服务咨询